
Investigadores de la Universidad Simon Fraser han diseñado polímeros impresos en 3D estructurados con un diseño que se puede ajustar a diferentes rigideces, capaz de manejar objetos blandos como frutas y verduras.
 En los últimos años, los investigadores han buscado crear asistentes personales robóticos y extremidades biónicas o prótesis que combinen la durabilidad de los robots comunes con la flexibilidad de los robots blandos. Más recientemente, las combinaciones de estructuras celulares han mostrado un avance interesante hacia la mejora de las capacidades no triviales, como el agarre de objetos con forma única.
En los últimos años, los investigadores han buscado crear asistentes personales robóticos y extremidades biónicas o prótesis que combinen la durabilidad de los robots comunes con la flexibilidad de los robots blandos. Más recientemente, las combinaciones de estructuras celulares han mostrado un avance interesante hacia la mejora de las capacidades no triviales, como el agarre de objetos con forma única.
En su último estudio publicado en Advanced Intelligent Systems, Woo Soo Kim y sus colegas de la Facultad de Ingeniería de Sistemas Mecatrónicos, de la Universidad Simon Fraser, han utilizado la impresión 3D para fabricar un cuerpo robótico arquitecturado con estructuras celulares ligeras deformables.
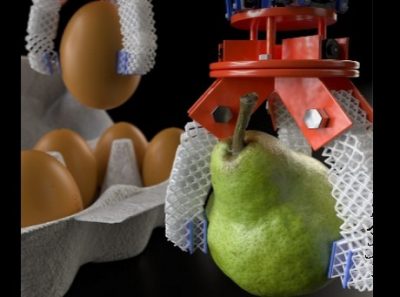
El equipo diseñó polímeros impresos en 3D estructurados con un diseño de celosía que se puede ajustar a diferentes rigideces, desde blanda y gomosa hasta dura y metálica. Con la impresión 3D, los dedos robóticos han podido fabricarse de manera eficiente y permiten la integración concurrente de un actuador, un sensor de presión y el cuerpo celular en 3D. Gracias a sus propiedades, el material flexible dota al dedo robótico de movimiento humano, pero también de propiedades de absorción de impactos y vibración, lo que da como resultado una protección superior de los componentes eléctricos internos.
En virtud de la tecnología celular arquitecturada, la pinza robótica es capaz de manejar objetos blandos como pimientos, tomates e incluso huevos sin romperos ni dañarlos, imitando la fuerza y la sensibilidad de una mano humana.
Chile
El Instituto de Investigaciones Agropecuaria (INIA) junto a investigadores de la Universidad Católica de Lovaina (Bélgica) desarrollaron en 2013 una mano robótica que permite cosechar frutos como, por ejemplo, manzanas y uva vinífera, en el momento óptimo de madurez.
“El equipo consiste en una plataforma inteligente con sensores, con una parte mecánica que consta de un brazo y un manipulador. Así el robot es capaz de ubicarse frente a una planta y realizar el movimiento de un cosechador, pero sabiendo a través de los sensores qué fruta está en condiciones de ser cortada y cuál no; discriminando en términos de madurez y calidad; lo que es una de las funciones más importantes de este robot”, según explica Stanley Best, Director Nacional del Programa de Agricultura de Precisión de INIA Quilamapu.
Fuente: SimFRUIT según información de Agrimundo